Da mich Kolbentanks schon immer interessiert haben wollte ich mich an diese Technik machen. Normale Tauchtanks mit Pumpen haben den Nachteil das man nicht wirklich messen kann, wieviel Wasser im Tank ist. Das Wasser fliesst bei einer Neigung des Boots in eine Seite des Tanks und verstärken die Neigung noch. Daher habe ich mich für einen Kolbentank entschieden.
Das Problem mit der Mechanik ist nun aber, dass ich kleine Drehbank zur Verfügung habe. Ich habe irgendwo schon gesehen dass Kolbentanks auf Basis von grossen Spritzen gebaut wurden. Da ich 3D-Drucker zur Verfügung habe, wollte ich versuchen einen Tank auf Basis einer Spritze, mechanischen Normteilen und 3D-Druck Teilen zu bauen. Alles mechanisch so einfach, aber natürlich funktional und sicher wie möglich.
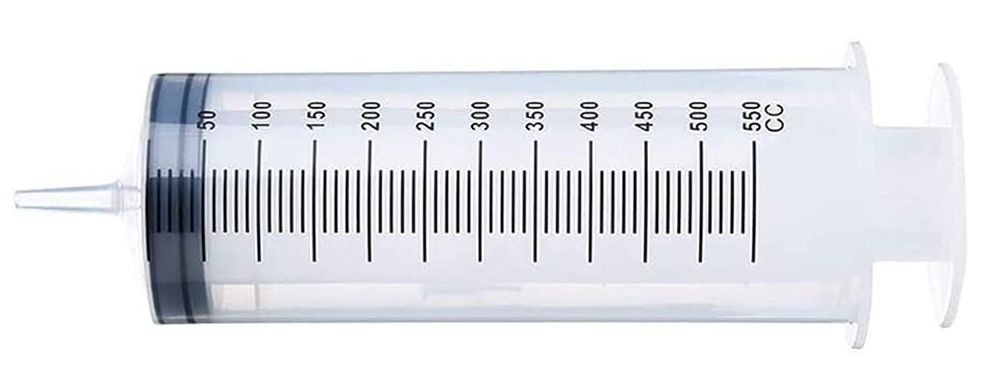
550ML Spritze
Ich habe mir die grösse Spritze ausgesucht, die ich gefunden habe (in entsprechendem Format). Ich hätte gerne auch noch eine Spritze mit grösserem Durchmesser benutzt, aber ich habe keine gefunden.
Auswahl der Spindel
Bei der Auswahl der Spindel habe ich mich hauptsächlich daran orientiert, welche Muttern es gibt. Das Kernproblem stellt hier das Hauptzahnrad dar, welches die Spindel bewegt. Eine normale Mutter genau zentrisch und gerade in ein Zahnrad zu kleben wäre sehr schwierig und könnte sich im Zweifelsfall im Einsatz lösen. Mit einer Drehbank würde ich mir ein Zahnrad oder Riemenrad aus Metall kaufen und in Gewinde schneiden – da ich das leider nicht kann musste etwas anderes her.
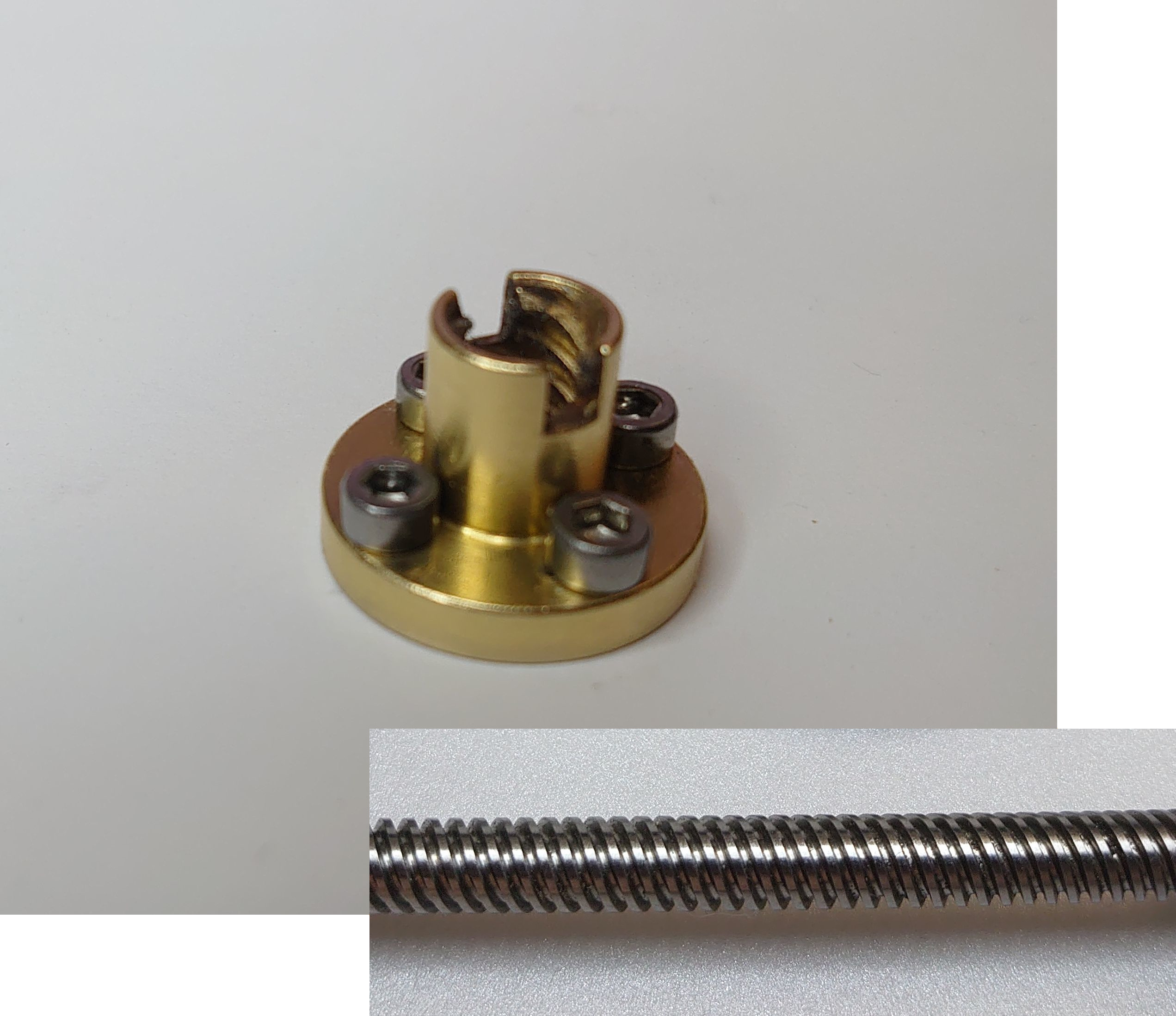
Von den 3D-Druckern kenne ich die TR9-Trapezspindeln welche Muttern zum Schrauben haben. Perfekt, damit ist es wunderbar möglich die Mutter ins Hauptzahnrad zu schrauben.
Ein ähnliches Problem bekommt man dann auch bei der Befestigung des Kolbens. Hier funktioniert die Mutter aber auch problemlos. Ich habe überlegt ob ich die Mutter auf die Spindel kleben soll, habe mich aber aus Sicherheitsgründen dagegen entschlossen. Stattdessen habe ich die Mutter mit der Spindel verlötet. Da braucht man eine Menge Wärme und Flussmittel – das ging aber recht gut und es hält Bombenfest!
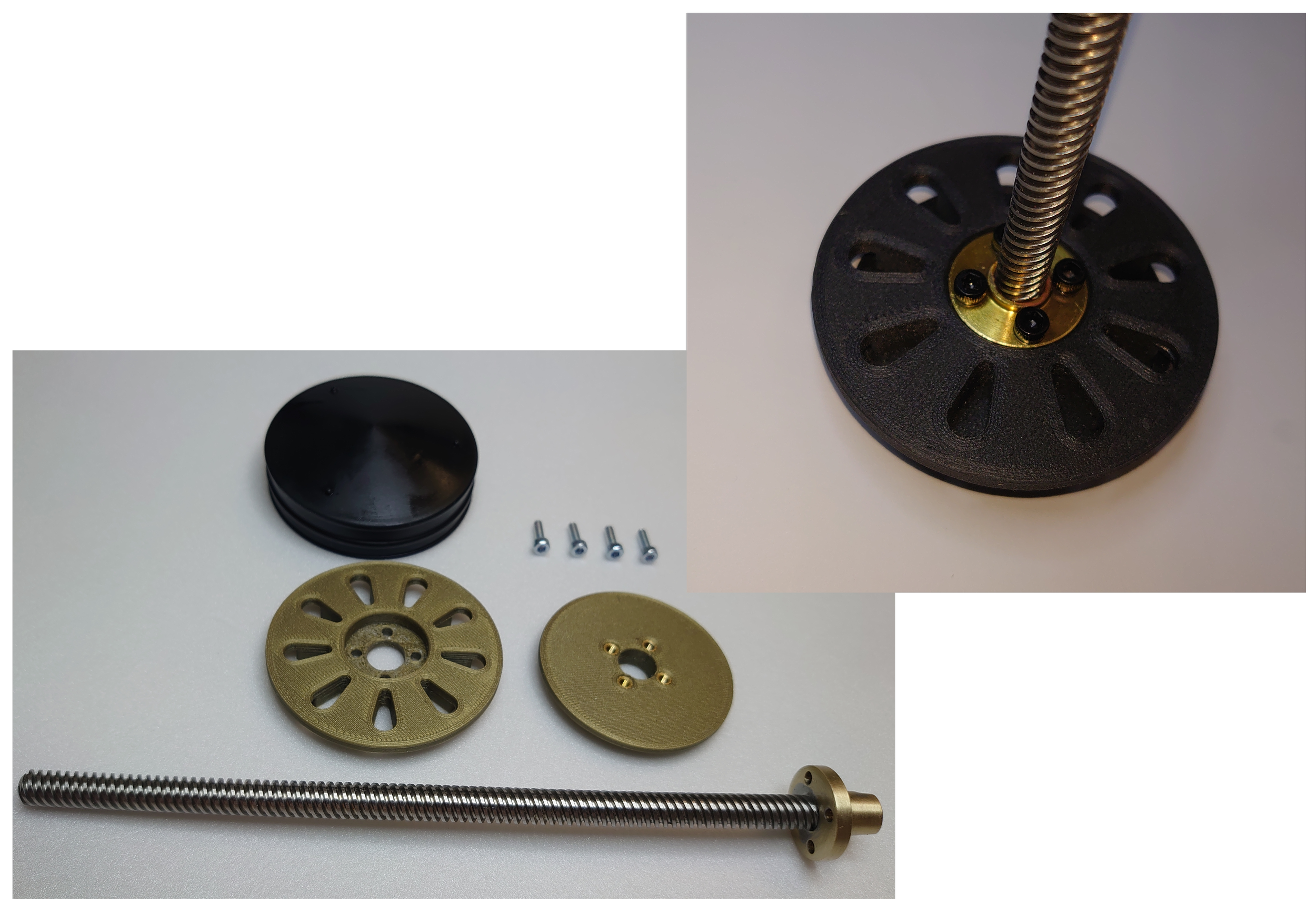
Am Ende habe ich mich doch dazu entschieden, die Mutter nicht ins Hauptzahnrad zu schrauben sondern die Schrauben als Mitnehmer zu verwenden.
Das Hauptzahnrad setzt sich aus mehreren Bauteilen zusammen. Als Lager kommen Drucklager zum Einsatz, die die Kräfte beim fluten und lenzen des Tanks ausnehmen sollen. Die 3D-Druck Innenteile halten die Lager an den entsprechenden Stellen.
Das komplette Hauptzahnrad mit Drucklager oben und unten. Die 4 Löcher sind vorgesehen um Magneten aufzunehmen um mittels Hall-Sensor die Position des Tanks zu ermitteln.
Mittlerweile sind hier aber 12 Löcher eingefügt um die Positionierung genauer zu machen. Zum Einsatz kommen kleine Rundmagneten mit 2x2mm.
Der Kolben
Der Kolben ist relativ einfach herzustellen. Das Gummiteil aus der Spritze wird entsprechend benutzt.
Die Konstruktion wird mit der gelöteten Spindel verschraubt.
Es muss beachtet werden, dass die Innenhalterung genug Platz für den Gummikolben lässt, da es sonst zur Verklemmung kommt.
Wenden wir uns dem Antrieb zu: da ich kein mehrstufiges Getriebe selbst bauen möchte kommt ein fertiger Getriebemotor zum Einsatz. Diese gibt es mit vielen verschiedenen Getriebeuntersetzungen, man kann also je nach Wahl eine schnelle Füllzeit oder Kraft erreichen.
Man bedenke dass der Wasserdruck im getauchten Zustand sehr hoch ist und genug Leistung vorhanden sein muss, um den Tank immer sicher entleeren zu können!
Hier sieht man den Motor inklusive der passenden Motorhalterung und dem Motorritzel. Dieses ist mittels 2 Schrauben auf die abgeflachte Motorwelle geschraubt um ein Lösen zu verhindern. Die Schrauben sind mit Loctite gesichert.
Restliche Mechanik
Nun fehlt noch die Restliche Mechanik, also einen Abschluss um in die Spritze geschraubt zu werden und eine obere Ebene. Zwischen Abschluss und oberer Ebene wird das Hauptzahnrad mittels der Drucklager gehalten.